- Оборудование и материалы для 3д печати



Плата автоотключения для 3Д Принтера
26.04.2023
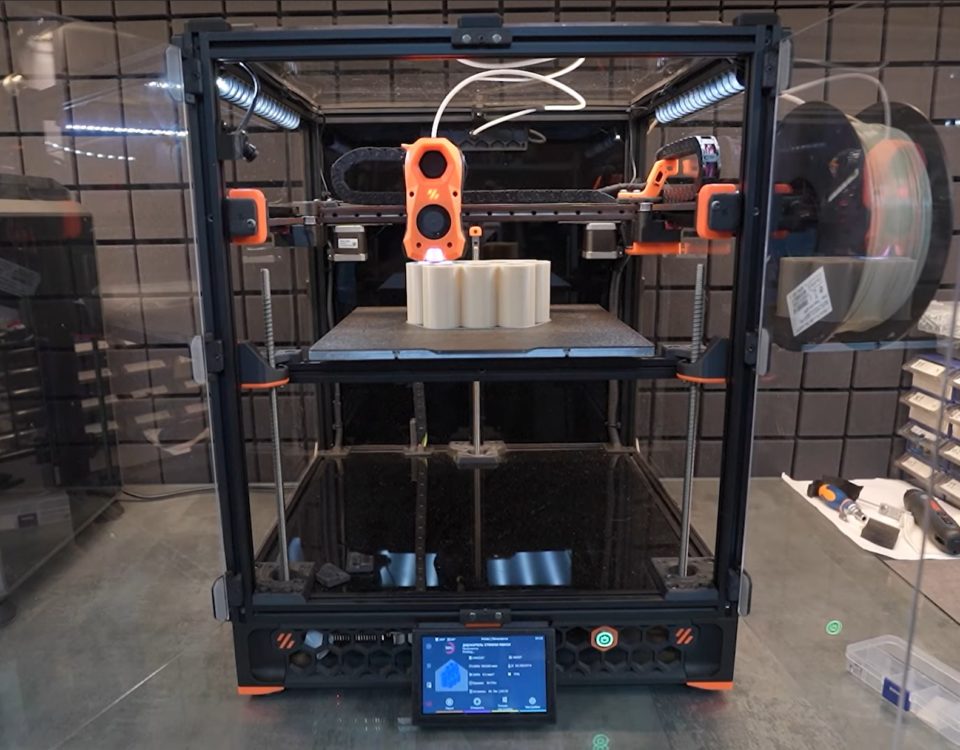
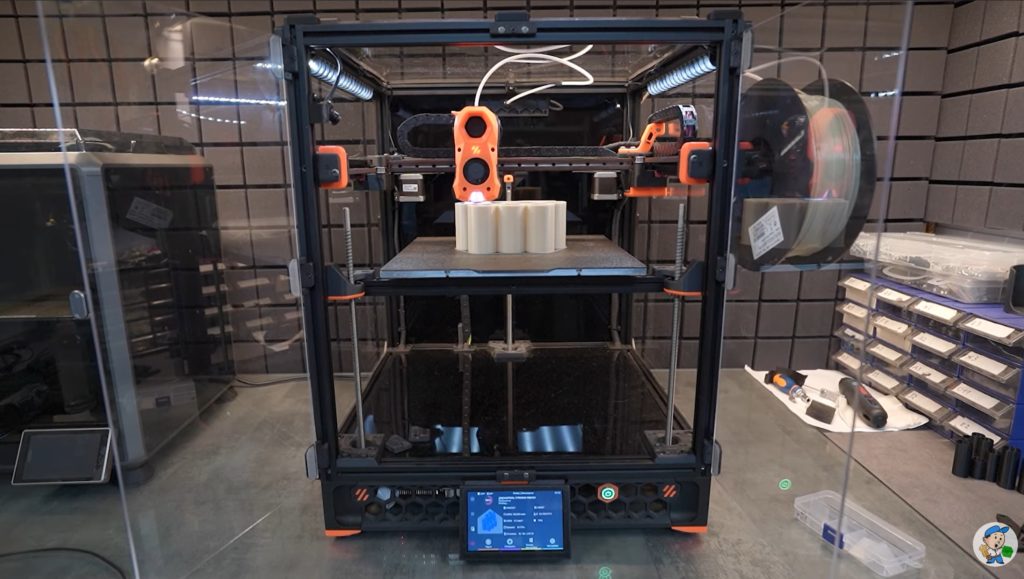
Прошивка для 3д принтера Flying Bear Aone 2
10.06.2023Страница добавлена в дополнение к видео Прошивка Klipper — что как зачем
ВНИМАНИЕ!!! Опубликованный конфиг предоставлен как образец.
Все указанные значения вы применяете для своих 3д принтеров на свой страх и риск!
На всех 3д принтерах я использую метод разбивки конфигурации на файлы, с подключением их в основном файле printer.cfg. Вы можете создать файлы изменив имена на свои, подключив их аналогично определением [include файл.cfg].
Вы можете не разбивать все на файлы, а собрать все в printer.cfg, минимализм иногда может быть и лучше, каждому своё=)
Обязательно требуются калибровки всего! Обнулите z_offset в разделе SAVE_CONFIG. Для другой платы управления лучше взять в пример конфигурацию именно для неё. В остальном макросы и прочее применимо для любых 3д принтеров, при условии замены имени пинов.
Все что может пригодиться закомментировано.
Надеюсь данная страница поможет вам в настройке своего 3д принтера.
ТТХ и замечания
- Кинематика — Cartesian с областью печати 180х180х190
- Драйвера в step/dir, но нужный код в конфиге есть, как паять есть упоминание в видео
- Экрана нет, принтер полностью управляется через web-сервер
- Ретракт и PA откалиброваны для PETG
- В данном конфиге применена корректировка таблицы термистора
- Если интересует что-то еще? Оставьте комментарий с вопросом в конце данной страницы.
printer.cfg
[printer]
kinematics: cartesian
max_velocity: 250
max_accel: 1800
max_accel_to_decel:1800
max_z_velocity: 25
max_z_accel: 100
square_corner_velocity: 5.0
[input_shaper]
shaper_freq_x: 23.0
shaper_freq_y: 39.0
shaper_type_x: mzv
shaper_type_y: mzv
[bed_screws]
#need calibration
screw1: 20,20
screw2: 160,20
screw3: 160,160
screw4: 20,160
[mcu]
serial: /dev/serial/by-id/usb-1a86_USB_Serial-if00-port0
baud: 250000
restart_method: command
[temperature_sensor raspberry]
sensor_type: temperature_host
[temperature_sensor MCU]
sensor_type: temperature_mcu
[static_digital_output display_reset]
pins: !PC6, !PD13
[virtual_sdcard]
path: ~/gcode_files
[gcode_arcs]
resolution: 0.05
[display_status]
[pause_resume]
[respond]
#[output_pin _BEEPER_pin]
#pin: PC5
#pwm: true
#value: 1
#shutdown_value: 0
#cycle_time: 0.001
#scale: 1000
#[filament_switch_sensor FilamentSensor]
#pause_on_runout: False
#runout_gcode:
# M118 Starting filament change
# M600
#insert_gcode:
#switch_pin: !PA4
#event_delay: 5.0
[include stepper.cfg]
[include tmc.cfg]
[include thermistor.cfg]
[include extruder.cfg]
[include bed.cfg]
[include fan.cfg
[include macros.cfg]stepper.cfg
[stepper_x]
step_pin: PE3
dir_pin: PE2
enable_pin: !PE4
full_steps_per_rotation: 200
microsteps: 64
# endstop_pin: tmc2209_stepper_x:virtual_endstop # enable to use Sensorless
rotation_distance: 40
endstop_pin: !PA15 # disable to use Sensorless
position_endstop: 0
position_min: 0
position_max: 180
homing_speed: 50
homing_retract_dist: 0
second_homing_speed: 3
[stepper_y]
step_pin: PE0
dir_pin: PB9
enable_pin: !PE1
full_steps_per_rotation: 200
microsteps: 64
# endstop_pin: tmc2209_stepper_y:virtual_endstop # enable to use Sensorless
rotation_distance: 40
endstop_pin: !PA12 # disable to use Sensorless
position_endstop: -2.5
position_min: -2.5
position_max: 180
homing_speed: 50
homing_retract_dist: 0
second_homing_speed: 3
[stepper_z]
step_pin: PB5
dir_pin: !PB4
enable_pin: !PB8
full_steps_per_rotation: 200
microsteps: 64
rotation_distance: 8
endstop_pin: !PA11 # disable to use BLTouch
# endstop_pin: probe:z_virtual_endstop # enable to use BLTouch
position_endstop: 0 # disable to use BLTouch
position_max: 190
homing_retract_dist: 10.0
second_homing_speed: 5
# position_min: -5 # enable to use BLTouch
tmc.cfg
# [tmc2209 stepper_x]
# uart_pin: PA3
# diag_pin: PA15
# uart_address: 0
# run_current: 0.650
# hold_current: 0.6
# driver_SGTHRS: 125 #enable to use Sensorless Homing
# stealthchop_threshold: 9999
# interpolate: false
# sense_resistor: 0.110
# driver_TBL: 2
# driver_TOFF: 3
# driver_HEND: 3
# driver_HSTRT: 0
# driver_PWM_GRAD: 8
# driver_PWM_LIM: 9
# [tmc2209 stepper_y]
# uart_pin: PA6
# diag_pin: PA12
# uart_address: 0
# run_current: 0.650
# hold_current: 0.6
# driver_SGTHRS: 125 #enable to use Sensorless Homing
# stealthchop_threshold: 9999
# interpolate: false
# sense_resistor: 0.110
# driver_TBL: 2
# driver_TOFF: 3
# driver_HEND: 3
# driver_HSTRT: 0
# driver_PWM_GRAD: 8
# driver_PWM_LIM: 9
# [tmc2209 stepper_z]
# uart_pin: PA1
# uart_address: 0
# run_current: 0.650
# hold_current: 0.6
# stealthchop_threshold: 9999
# interpolate: false
# sense_resistor: 0.110
# driver_TBL: 0
# driver_TOFF: 3
# driver_HEND: 2
# driver_HSTRT: 0
# driver_PWM_GRAD: 8
# driver_PWM_LIM: 10
# [tmc2209 extruder]
# uart_pin: PE5
# uart_address: 0
# run_current: 0.500
# hold_current: 0.250
# sense_resistor: 0.110
# stealthchop_threshold: 0
# interpolate: false
# sense_resistor: 0.110
thermistor.cfg
[thermistor Kingroon_Calibrated B3950]
temperature1: 25.0
resistance1: 103180.0
temperature2: 150.0
resistance2: 1366.2
temperature3: 250.0
resistance3: 168.6
extruder.cfg
[extruder]
step_pin: PD6
dir_pin: !PD3
enable_pin: !PB3
full_steps_per_rotation: 200
microsteps: 64
rotation_distance: 31.776 #red head
# BMG Extruder ->
# rotation_distance: 22.6789511
# gear_ratio = 50:17
# Titan Extruder ->
# rotation_distance: 7.940
nozzle_diameter: 0.400
filament_diameter: 1.750
heater_pin: PC3
sensor_type: Kingroon_Calibrated B3950
sensor_pin: PC1
control: pid
pid_Kp: 19.0
pid_Ki: 1.34
pid_Kd: 67.5
min_temp: 0
max_temp: 300
pressure_advance: 0.05
pressure_advance_smooth_time = 0.040
[verify_heater extruder]
max_error: 120
check_gain_time: 30
hysteresis: 5
heating_gain: 2
bed.cfg
[heater_bed]
heater_pin: PA0
sensor_type: Kingroon_Calibrated B3950
sensor_pin: PC0
control: pid
pid_Kp: 40.68
pid_Ki: 7.93
pid_Kd: 139.15
min_temp: 0
max_temp: 130
[verify_heater heater_bed]
max_error: 120
check_gain_time: 60
hysteresis: 5
heating_gain: 2fan.cfg
[fan]
pin: PB1
[heater_fan my_nozzle_fan]
pin: PB0
heater: extruder
heater_temp: 50.0
fan_speed: 1.0
shutdown_speed: 1macros.cfg
Набор типовых макросов, смотреть в соответствующей статье с пояснениями, что куда зачем =)
{kind=link}