- Оборудование и материалы для 3д печати



Набор макросов для прошивки Klipper
14.07.2023Обязательно ознакомится перед обновлением прошивки!
26.10.2023
ВНИМАНИЕ!!! Опубликованный конфиг предоставлен как образец.
Все указанные значения вы применяете для своих принтеров на свой страх и риск!
На всех 3д принтерах я использую метод разбивки конфигурации на файлы, с подключением их в основном файле printer.cfg. Вы можете создать файлы изменив имена на свои, подключив их аналогично определением [include файл.cfg].
Вы можете не разбивать все на файлы, а собрать все в printer.cfg, минимализм иногда может быть и лучше, каждому своё=)
Обязательно требуются калибровки всего! Обнулите z_offset в разделе SAVE_CONFIG. Для другой платы управления лучше взять в пример конфигурацию именно для неё. В остальном макросы и прочее применимо для любых 3д принтеров, при условии замены имени пинов.
Надеюсь данная страница поможет вам в настройке своего 3д принтера.
ТТХ 3д принтера
- Кинематика — Core XY с областью печати 300x300x300
- Парковка по Z осуществляется механическим датчиком, выравнивание по углам и построение сетки кривизны стола — индуктивным
- Поверхность стола -стальная пластина PEI
- Плата управления BTT Octopus Pro
- Хост — RPi4 1Gb
- Экран KeDei 5 дюймов, аналог waveshare
- Голова StealthBurner, по сколько она с подсветкой на адресных светодиодах, по конфигу раскиданы макросы для изменения подсветки в зависимости от режима работы 3д принтера. На всякий случай добавлен конфиг stealthburner_leds
- Установлена подсветка рабочей зоны, подключена на один из силовых выходов. Настроено автоматическое включение по старту и выключение по завершению печати.
- Ретракт и PA откалиброваны для PETG
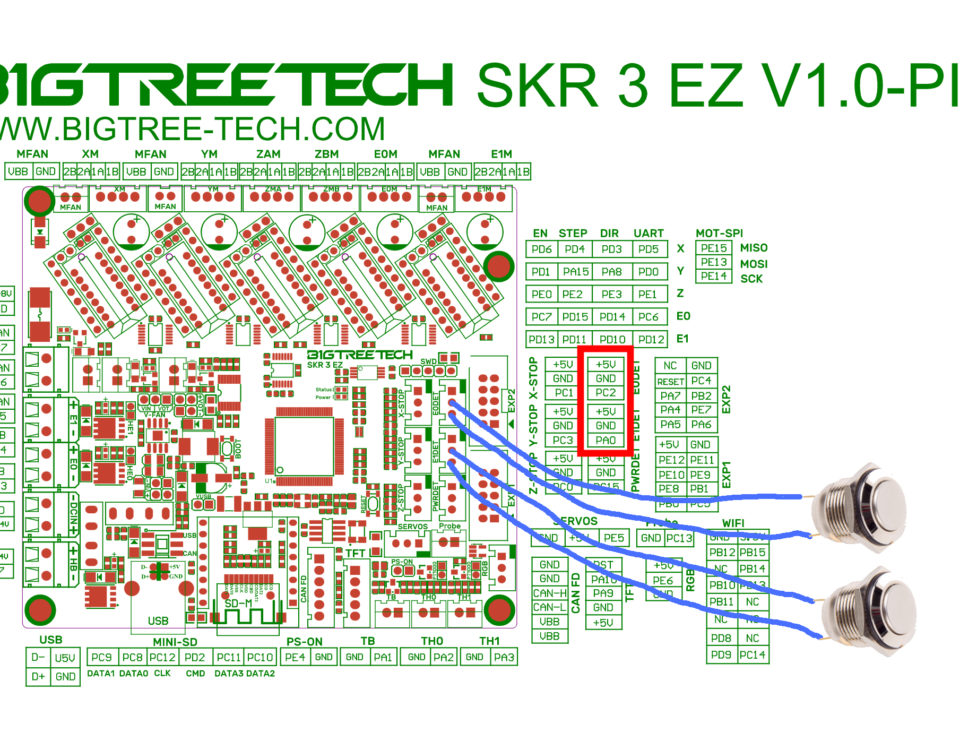
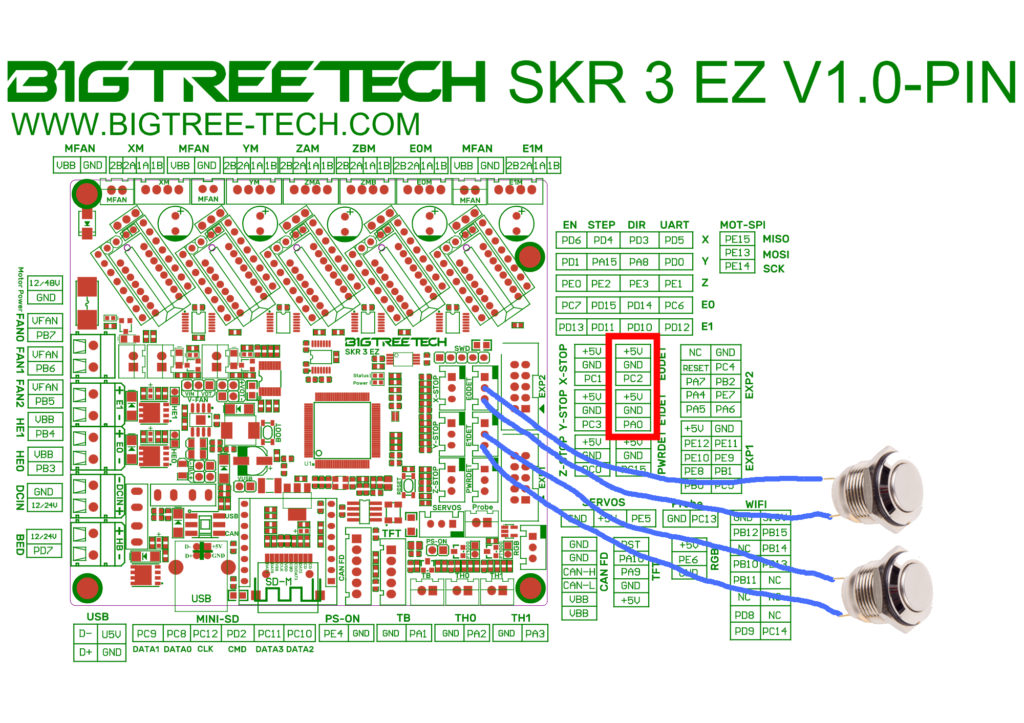
- Установлена плата автоотключения, настроены для нее работа пинов, один на автоотключение — и два для работы макросов. По двойному нажатию кнопки — пауза, по второму преднагрев для петжа (создан отдельный макрос)
- Настроена очистка сопла, путем просЁра части пластика мима стола. Ни каких щеток не нужно=)
- Установлена камера на 2МП, поэтому добавлен конфиг crowsnest
Если интересует что-то еще, оставьте комментарий с вопросом в конце данной страницы или пишите мне в сообществах.
printer.cfg
[mcu]
serial: /dev/serial/by-path/platform-fd500000.pcie-pci-0000:01:00.0-usb-0:1.4:1.0
restart_method: command
[mcu rpi]
serial: /tmp/klipper_host_mcu
[adxl345]
cs_pin: rpi:None
axes_map: z,y,x
[resonance_tester]
accel_chip: adxl345
probe_points:
175, 175, 20 # an example
[printer]
kinematics: corexy
max_velocity: 300
max_accel: 8000 #Max 4000
max_accel_to_decel: 4000
max_z_velocity: 15 #Max 15 for 12V TMC Drivers, can increase for 24V
max_z_accel: 350
square_corner_velocity: 5.0
[include stepper.cfg]
[include extruder.cfg]
[include bed.cfg]
[include fan.cfg]
[include macros.cfg]
[include ledlight.cfg]
[include stealthburner_leds.cfg]
[idle_timeout]
timeout: 1800
[pause_resume]
[display_status]
[exclude_object]
[virtual_sdcard]
path: /home/pi/printer_1_data/gcodes
[temperature_sensor host]
sensor_type: temperature_host
min_temp: 0
max_temp: 100
[temperature_sensor mcu_temp]
sensor_type: temperature_mcu
min_temp: 0
max_temp: 100
[gcode_button press_heating]
pin: !PG12
press_gcode: heating
[gcode_button press_pause]
pin: !PG13
press_gcode: PAUSE
#*# <---------------------- SAVE_CONFIG ---------------------->
#*# DO NOT EDIT THIS BLOCK OR BELOW. The contents are auto-generated.
#*#
#*# [extruder]
#*# control = pid
#*# pid_kp = 35.480
#*# pid_ki = 3.072
#*# pid_kd = 102.449
#*#
#*# [heater_bed]
#*# control = pid
#*# pid_kp = 39.083
#*# pid_ki = 0.219
#*# pid_kd = 1741.136
#*#
#*# [stepper_z]
#*# position_endstop = 0.400
#*#
#*# [probe]
#*# z_offset = 0.450
#*#
#*# [input_shaper]
#*# shaper_type_x = mzv
#*# shaper_freq_x = 63.8
#*# shaper_type_y = mzv
#*# shaper_freq_y = 46.0
#*#
#*# [bed_mesh default]
#*# version = 1
#*# points =
#*# -0.009654, -0.027779, -0.015279, -0.015904, 0.000346
#*# 0.034096, 0.003471, 0.010971, 0.001596, -0.005904
#*# 0.076596, 0.036596, 0.025346, 0.005971, -0.001529
#*# 0.049721, 0.020346, 0.007221, 0.005971, -0.020904
#*# 0.017846, -0.002154, 0.000346, -0.001529, -0.022154
#*# x_count = 5
#*# y_count = 5
#*# mesh_x_pps = 2
#*# mesh_y_pps = 2
#*# algo = lagrange
#*# tension = 0.2
#*# min_x = 25.0
#*# max_x = 265.0
#*# min_y = 25.0
#*# max_y = 265.0stepper.cfg
[stepper_x]
step_pin: PF13
dir_pin: PF12
enable_pin: !PF14
rotation_distance: 40
microsteps: 32
full_steps_per_rotation: 200 #set to 400 for 0.9 degree stepper
endstop_pin: PG9
position_min: 0
position_endstop: 300
position_max: 300
homing_speed: 60 #Max 100
homing_retract_dist: 5
homing_positive_dir: true
## Make sure to update below for your relevant driver (2208 or 2209)
[tmc2209 stepper_x]
uart_pin: PC4
interpolate: False
run_current: 1.3
sense_resistor: 0.110
stealthchop_threshold: 0
## A Stepper - Right
## Connected to MOTOR_1
## Endstop connected to DIAG_1
[stepper_y]
step_pin: PG0
dir_pin: PG1
enable_pin: !PF15
rotation_distance: 40
microsteps: 32
full_steps_per_rotation:200 #set to 400 for 0.9 degree stepper
endstop_pin: !PG6
position_min: 0
position_endstop: 305
position_max: 305
homing_speed: 60 #Max 100
homing_retract_dist: 5
homing_positive_dir: true
[tmc2209 stepper_y]
uart_pin: PD11
interpolate: False
run_current: 1.3
sense_resistor: 0.110
stealthchop_threshold: 0
#####################################################################
# Z Stepper Settings
#####################################################################
[stepper_z]
step_pin: PF11
dir_pin: !PG3
enable_pin: !PG5
# Rotation Distance for TR8x8 = 8, TR8x4 = 4, TR8x2 = 2
rotation_distance: 4
microsteps: 32
endstop_pin: PG10
position_max: 300
position_min: -2.5
homing_speed: 8.0 # Leadscrews are slower than 2.4, 10 is a recommended max.
second_homing_speed: 3
homing_retract_dist: 3
## Make sure to update below for your relevant driver (2208 or 2209)
[tmc2209 stepper_z]
uart_pin: PC6
interpolate: False
run_current: 0.6
sense_resistor: 0.110
stealthchop_threshold: 9999
[stepper_z1]
step_pin: PG4
dir_pin: !PC1
enable_pin: !PA0
# Rotation Distance for TR8x8 = 8, TR8x4 = 4, TR8x2 = 2
rotation_distance: 4
microsteps: 32
[tmc2209 stepper_z1]
uart_pin: PC7
interpolate: False
run_current: 0.6
sense_resistor: 0.110
stealthchop_threshold: 9999
[stepper_z2]
step_pin: PF9
dir_pin: !PF10
enable_pin: !PG2
# Rotation Distance for TR8x8 = 8, TR8x4 = 4, TR8x2 = 2
rotation_distance: 4
microsteps: 32
[tmc2209 stepper_z2]
uart_pin: PF2
interpolate: False
run_current: 0.6
sense_resistor: 0.110
stealthchop_threshold: 9999extruder.cfg
[extruder]
step_pin: PE2
dir_pin: !PE3
enable_pin: !PD4
## Update value below when you perform extruder calibration
## If you ask for 100mm of filament, but in reality it is 98mm:
## rotation_distance = <previous_rotation_distance> * <actual_extrude_distance> / 100
## 22.6789511 is a good starting point
rotation_distance: 21.7717930 #Bondtech 5mm Drive Gears
## Update Gear Ratio depending on your Extruder Type
## Use 50:10 for Stealthburner/Clockwork 2
## Use 50:17 for Afterburner/Clockwork (BMG Gear Ratio)
## Use 80:20 for M4, M3.1
gear_ratio: 50:10 #BMG Gear Ratio
microsteps: 32
full_steps_per_rotation: 200 #200 for 1.8 degree, 400 for 0.9 degree
nozzle_diameter: 0.400
filament_diameter: 1.75
heater_pin: PA2
## Check what thermistor type you have. See https://www.klipper3d.org/Config_Reference.html#common-thermistors for common thermistor types.
## Use "Generic 3950" for NTC 100k 3950 thermistors
sensor_type: EPCOS 100K B57560G104F
sensor_pin: PF4
min_temp: 10
max_temp: 270
max_power: 1.0
min_extrude_temp: 170
# control: pid
# pid_kp: 26.213
# pid_ki: 1.304
# pid_kd: 131.721
pressure_advance: 0.05
pressure_advance_smooth_time: 0.040
[verify_heater extruder]
hysteresis: 10
max_error: 200
heating_gain: 5
check_gain_time:120
[firmware_retraction]
retract_length: 0.6
retract_speed: 40
unretract_extra_length: 0
unretract_speed: 30
[tmc2209 extruder]
uart_pin: PE1
interpolate: false
run_current: 0.6
sense_resistor: 0.110
stealthchop_threshold: 0bed.cfg
[heater_bed]
## SSR Pin - HE1
## Thermistor - T
heater_pin: PA3
## Check what thermistor type you have. See https://www.klipper3d.org/Config_Reference.html#common-thermistors for common thermistor types.
## Use "Generic 3950" for Keenovo heaters
sensor_type: EPCOS 100K B57560G104F
sensor_pin: PF3
## Adjust Max Power so your heater doesn't warp your bed. Rule of thumb is 0.4 watts / cm^2 .
max_power: 0.7
min_temp: 0
max_temp: 120
# control: pid
# pid_kp: 58.437
# pid_ki: 2.347
# pid_kd: 363.769
[probe]
## Inductive Probe
## This probe is not used for Z height, only Quad Gantry Leveling
# Select the probe port by type:
## For the PROBE port. Will not work with Diode. May need pull-up resistor from signal to 24V.
#pin: ~!PB7
## For the DIAG_7 port. NEEDS BAT85 DIODE! Change to !PG15 if probe is NO.
pin: !PG15
## For Octopus Pro Probe port; NPN and PNP proximity switch types can be set by jumper
#pin: ~!PC5
#--------------------------------------------------------------------
x_offset: 0
y_offset: 25
speed: 10.0
samples: 3
samples_result: median
sample_retract_dist: 3.0
samples_tolerance: 0.006
samples_tolerance_retries: 3
[bed_mesh]
speed: 120
mesh_min: 25,25
mesh_max: 265,265
probe_count: 5,5
fade_start: 1
fade_end: 10
algorithm: lagrange
horizontal_move_z: 10
mesh_pps: 2,2
[safe_z_home]
## XY Location of the Z Endstop Switch
## Update -10,-10 to the XY coordinates of your endstop pin
## (such as 157,305) after going through Z Endstop Pin
## Location Definition step.
home_xy_position: 171,305
speed:100
z_hop:10
[z_tilt]
z_positions:
-50, 18
150, 348
350, 18
points:
30, 5
150, 245
270, 5
speed: 200
horizontal_move_z: 10
retries: 5
retry_tolerance: 0.0075fan.cfg
[fan]
## Print Cooling Fan - FAN0
pin: PD13
kick_start_time: 0.5
## Depending on your fan, you may need to increase this value
## if your fan will not start. Can change cycle_time (increase)
## if your fan is not able to slow down effectively
off_below: 0.10
[heater_fan hotend_fan]
## Hotend Fan - FAN1
pin: PD14
max_power: 1.0
kick_start_time: 0.5
heater: extruder
heater_temp: 50.0
## If you are experiencing back flow, you can reduce fan_speed
#fan_speed: 1.0
[controller_fan controller_fan]
## Controller fan - FAN2
pin: PB10
max_power: 0.6
kick_start_time: 0.5
heater: heater_bed
#[heater_fan exhaust_fan]
## Exhaust fan - FAN3
#pin: PD13
#max_power: 1.0
#shutdown_speed: 0.0
#kick_start_time: 5.0
#heater: heater_bed
#heater_temp: 60
#fan_speed: 1.0macros.cfg
[gcode_macro SHUTDOWN_MACHINE]
gcode:
{action_call_remote_method("shutdown_machine")}
M81
# Добавить следующие строки в начальный джикод слайсера
# Cura: START_PRINT EXTRUDER_TEMP={material_print_temperature_layer_0} BED_TEMP={material_bed_temperature_layer_0}
# PrusaSlicer:
# M140 S0
# M104 S0
# START_PRINT EXTRUDER_TEMP=[first_layer_temperature] BED_TEMP=[first_layer_bed_temperature]
# Добавить в завершающий джикод: END_PRINT
[gcode_macro heating]
gcode:
SET_HEATER_TEMPERATURE HEATER=heater_bed TARGET=85
SET_HEATER_TEMPERATURE HEATER=extruder TARGET=230
STSTUS_HEATING
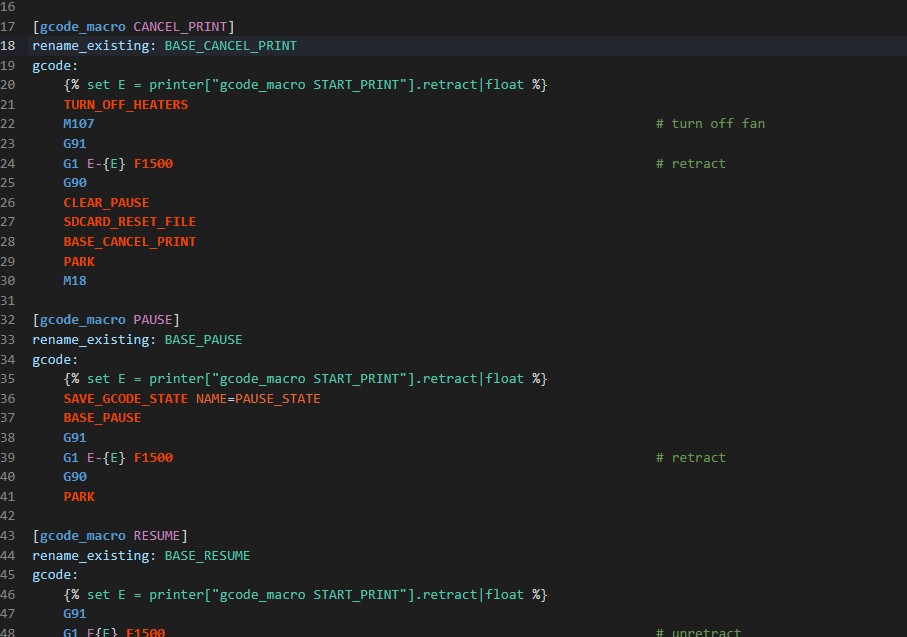
[gcode_macro CANCEL_PRINT]
rename_existing: BASE_CANCEL_PRINT
gcode:
{% set E = printer["gcode_macro START_PRINT"].retract|float %}
TURN_OFF_HEATERS
M107 # turn off fan
G91
G1 E-{E} F1500 # retract
G90
CLEAR_PAUSE
SDCARD_RESET_FILE
BASE_CANCEL_PRINT
PARK
M18
[gcode_macro PAUSE]
rename_existing: BASE_PAUSE
gcode:
{% set E = printer["gcode_macro START_PRINT"].retract|float %}
SAVE_GCODE_STATE NAME=PAUSE_STATE
BASE_PAUSE
G91
G1 E-{E} F1500 # retract
G90
PARK
[gcode_macro RESUME]
rename_existing: BASE_RESUME
gcode:
{% set E = printer["gcode_macro START_PRINT"].retract|float %}
G91
G1 E{E} F1500 # unretract
G90
RESTORE_GCODE_STATE NAME=PAUSE_STATE MOVE=1
BASE_RESUME
STATUS_PRINTING
[gcode_macro PARK]
gcode:
STATUS_MESHING
{% set x_park = params.X|default(10)|float %}
{% set y_park = params.Y|default(180)|float %}
{% set z_park = params.Z|default(10)|float + printer.toolhead.position.z|float %}
{% set x_max = printer.toolhead.axis_maximum.x|float %}
{% set y_max = printer.toolhead.axis_maximum.y|float %}
{% set z_max = printer.toolhead.axis_maximum.z|float %}
{% if x_park > x_max %}
{% set x_park = x_max %}
{% endif %}
{% if y_park > y_max %}
{% set y_park = y_max %}
{% endif %}
{% if z_park > z_max %}
{% set z_park = z_max %}
{% endif %}
SAVE_GCODE_STATE NAME=PARK_STATE
G90 # absolute positioning
G1 Z{z_park} F1500
G1 X{x_park} Y{y_park} F5000
RESTORE_GCODE_STATE name=PARK_STATE
[gcode_macro START_PRINT]
variable_retract: 3
gcode:
M117 Heating
SET_PIN PIN=caselight VALUE=0.6
STATUS_HEATING
{% set extruder_temp = params.EXTRUDER_TEMP|default(220)|float %}
{% set bed_temp = params.BED_TEMP|default(70)|float %}
{% set E = printer["gcode_macro START_PRINT"].retract|float %}
CLEAR_PAUSE
M220 S100 # reset feedrate
M221 S100
SET_HEATER_TEMPERATURE HEATER=heater_bed TARGET={bed_temp} # set bed t℃
TEMPERATURE_WAIT SENSOR=heater_bed MINIMUM={bed_temp * 0.90} # wait until bed is partially heated
#G4 P300000
SET_HEATER_TEMPERATURE HEATER=extruder TARGET={extruder_temp} # set nozzle t℃
G90 # absolute positioning
M82 # absolute extrusion mode
TEMPERATURE_WAIT SENSOR=heater_bed MINIMUM={bed_temp} # wait until
TEMPERATURE_WAIT SENSOR=extruder MINIMUM={extruder_temp} # wait until\
M117 Home
STATUS_HOMING
G28
CLEANING
# Z_TILT_ADJUST
G0 Z10 F1500 # raise Z
G92 E0 # reset extruder
G1 E{E} F1500 # prime
G92 E0
BED_MESH_PROFILE LOAD=default # reset extruder
M117 Printing...
STATUS_PRINTING
[gcode_macro CLEANING]
gcode:
STATUS_CLEANING
G91
G1 X-100 F6000
G90
M83
G1 E50 F300
[gcode_macro END_PRINT]
gcode:
{% set E = printer["gcode_macro START_PRINT"].retract|float %}
TURN_OFF_HEATERS
M107 # turn off fan
G91 # relative positioning
G1 E-{E} F1500 # retract
G0 X5 Y5 F5000 # wipe
# G0 Z2 F1500 # raise Z
G90 # absolute positioning
PARK
M84 # turn off all motors
M106 S200
G4 P100000
M106 S0
STSTUS_OFF
SET_PIN PIN=caselight VALUE=0.00
[gcode_macro PID_E]
gcode:
{% set T = params.T|default(240) %}
PID_CALIBRATE HEATER=extruder TARGET={T}
[gcode_macro PID_B]
gcode:
{% set T = params.T|default(80) %}
PID_CALIBRATE HEATER=heater_bed TARGET={T}
[gcode_macro MOTOR_OFF]
gcode:
M18
[gcode_macro M81]
gcode:
SET_PIN PIN=POWER_OFF VALUE=1
[output_pin POWER_OFF]
pin: !PE11
shutdown_value: 1
[gcode_macro M81]
gcode:
SET_PIN PIN=POWER_OFF VALUE=1
[gcode_macro INPUTSHAPER]
gcode:
G90
G28
{% set POSITION_X = printer.configfile.settings['stepper_x'].position_max/2 %}
{% set POSITION_Y = printer.configfile.settings['stepper_y'].position_max/2 %}
G1 X{POSITION_X} Y{POSITION_Y} Z5 F6000
SHAPER_CALIBRATEledlight.cfg
[output_pin caselight]
pin: PB11
pwm:true
value: 0.4
shutdown_value: 0
cycle_time: 0.01stealthburner_leds.cfg
[neopixel sb_leds]
pin: PB0
# The pin connected to the neopixel. This parameter must be provided.
chain_count: 3
# The number of Neopixel chips that are "daisy chained" to the
# provided pin. The default is 1 (which indicates only a single
# Neopixel is connected to the pin).
color_order: GRB
# Set the pixel order required by the LED hardware. Options are GRB,
# RGB, GRBW, or RGBW. The default is GRB.
initial_RED: 1.0
initial_GREEN: 0.0
initial_BLUE: 1.0
initial_WHITE: 0.0
[gcode_macro _sb_vars]
# User settings for the StealthBurner status leds. You can change the status colors and l
# configurations for the logo and nozzle here.
variable_colors: {
'logo': { # Colors for logo states
'busy': {'r': 0.4, 'g': 0.0, 'b': 0.0, 'w': 0.0},
'cleaning': {'r': 0.0, 'g': 0.02, 'b': 0.5, 'w': 0.0},
'calibrating_z': {'r': 0.8, 'g': 0., 'b': 0.35, 'w': 0.0},
'heating': {'r': 0.3, 'g': 0.18, 'b': 0.0, 'w': 0.0},
'homing': {'r': 0.0, 'g': 0.6, 'b': 0.2, 'w': 0.0},
'leveling': {'r': 0.5, 'g': 0.1, 'b': 0.4, 'w': 0.0},
'meshing': {'r': 0.2, 'g': 1.0, 'b': 0.0, 'w': 0.0},
'off': {'r': 0.0, 'g': 0.0, 'b': 0.0, 'w': 0.0},
'printing': {'r': 1.0, 'g': 0.0, 'b': 0.0, 'w': 0.0},
'standby': {'r': 0.01, 'g': 0.01, 'b': 0.01, 'w': 0.1},
},
'nozzle': { # Colors for nozzle states
'heating': {'r': 0.8, 'g': 0.35, 'b': 0.0, 'w':0.0},
'off': {'r': 0.0, 'g': 0.0, 'b': 0.0, 'w': 0.0},
'on': {'r': 0.8, 'g': 0.8, 'b': 0.8, 'w':1.0},
'standby': {'r': 0.6, 'g': 0.0, 'b': 0.0, 'w':0.0},
},
'thermal': {
'hot': {'r': 1.0, 'g': 0.0, 'b': 0.0, 'w': 0.0},
'cold': {'r': 0.3, 'g': 0.0, 'b': 0.3, 'w': 0.0}
}
}
variable_logo_led_name: "sb_leds"
# The name of the addressable LED chain that contains the logo LED(s)
variable_logo_idx: "1"
# A comma-separated list of indexes LEDs in the logo
variable_nozzle_led_name: "sb_leds"
# The name of the addressable LED chain that contains the nozzle LED(s). This will
# typically be the same LED chain as the logo.
variable_nozzle_idx: "2,3"
# A comma-separated list of indexes of LEDs in the nozzle
gcode:
# This section is required. Do Not Delete.
[gcode_macro _set_sb_leds]
gcode:
{% set red = params.RED|default(0)|float %}
{% set green = params.GREEN|default(0)|float %}
{% set blue = params.BLUE|default(0)|float %}
{% set white = params.WHITE|default(0)|float %}
{% set led = params.LED|string %}
{% set idx = (params.IDX|string).split(',') %}
{% set transmit_last = params.TRANSMIT|default(1) %}
{% for led_index in idx %}
{% set transmit=transmit_last if loop.last else 0 %}
set_led led={led} red={red} green={green} blue={blue} white={white} index={led_index} transmit={transmit}
{% endfor %}
[gcode_macro _set_sb_leds_by_name]
gcode:
{% set leds_name = params.LEDS %}
{% set color_name = params.COLOR %}
{% set color = printer["gcode_macro _sb_vars"].colors[leds_name][color_name] %}
{% set led = printer["gcode_macro _sb_vars"][leds_name + "_led_name"] %}
{% set idx = printer["gcode_macro _sb_vars"][leds_name + "_idx"] %}
{% set transmit = params.TRANSMIT|default(1) %}
_set_sb_leds led={led} red={color.r} green={color.g} blue={color.b} white={color.w} idx="{idx}" transmit={transmit}
[gcode_macro _set_logo_leds]
gcode:
{% set red = params.RED|default(0)|float %}
{% set green = params.GREEN|default(0)|float %}
{% set blue = params.BLUE|default(0)|float %}
{% set white = params.WHITE|default(0)|float %}
{% set led = printer["gcode_macro _sb_vars"].logo_led_name %}
{% set idx = printer["gcode_macro _sb_vars"].logo_idx %}
{% set transmit=params.TRANSMIT|default(1) %}
_set_sb_leds led={led} red={red} green={green} blue={blue} white={white} idx="{idx}" transmit={transmit}
[gcode_macro _set_nozzle_leds]
gcode:
{% set red = params.RED|default(0)|float %}
{% set green = params.GREEN|default(0)|float %}
{% set blue = params.BLUE|default(0)|float %}
{% set white = params.WHITE|default(0)|float %}
{% set led = printer["gcode_macro _sb_vars"].nozzle_led_name %}
{% set idx = printer["gcode_macro _sb_vars"].nozzle_idx %}
{% set transmit=params.TRANSMIT|default(1) %}
_set_sb_leds led={led} red={red} green={green} blue={blue} white={white} idx="{idx}" transmit={transmit}
[gcode_macro set_logo_leds_off]
gcode:
{% set transmit=params.TRANSMIT|default(1) %}
_set_logo_leds red=0 blue=0 green=0 white=0 transmit={transmit}
[gcode_macro set_nozzle_leds_on]
gcode:
{% set transmit=params.TRANSMIT|default(1) %}
_set_sb_leds_by_name leds="nozzle" color="on" transmit={transmit}
[gcode_macro set_nozzle_leds_off]
gcode:
{% set transmit=params.TRANSMIT|default(1) %}
_set_sb_leds_by_name leds="nozzle" color="off" transmit={transmit}
[gcode_macro status_off]
gcode:
set_logo_leds_off transmit=0
set_nozzle_leds_off
[gcode_macro status_ready]
gcode:
_set_sb_leds_by_name leds="logo" color="standby" transmit=0
_set_sb_leds_by_name leds="nozzle" color="standby" transmit=1
[gcode_macro status_busy]
gcode:
_set_sb_leds_by_name leds="logo" color="busy" transmit=0
set_nozzle_leds_on
[gcode_macro status_heating]
gcode:
_set_sb_leds_by_name leds="logo" color="heating" transmit=0
_set_sb_leds_by_name leds="nozzle" color="heating" transmit=1
[gcode_macro status_leveling]
gcode:
_set_sb_leds_by_name leds="logo" color="leveling" transmit=0
set_nozzle_leds_on
[gcode_macro status_homing]
gcode:
_set_sb_leds_by_name leds="logo" color="homing" transmit=0
set_nozzle_leds_on
[gcode_macro status_cleaning]
gcode:
_set_sb_leds_by_name leds="logo" color="cleaning" transmit=0
set_nozzle_leds_on
[gcode_macro status_meshing]
gcode:
_set_sb_leds_by_name leds="logo" color="meshing" transmit=0
set_nozzle_leds_on
[gcode_macro status_calibrating_z]
gcode:
_set_sb_leds_by_name leds="logo" color="calibrating_z" transmit=0
set_nozzle_leds_on
[gcode_macro status_printing]
gcode:
_set_sb_leds_by_name leds="logo" color="printing" transmit=0
set_nozzle_leds_on
{kind=link}